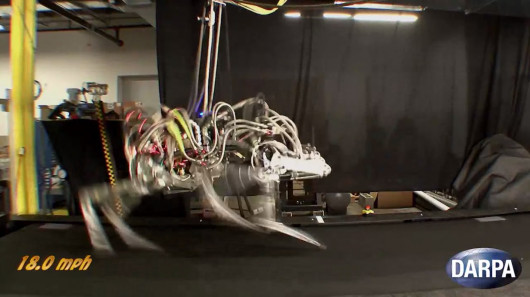
A chita robótica foi desenvolvida para se comportar de forma idêntica às chitas de carne e osso, correndo apoiada nas quatro patas e dobrando e desdobrando a coluna de forma a ganhar maior velocidade. O autómato, que está a ser desenvolvido com o apoio da DARPA, ainda não consegue ser autónomo, implicando um braço que segura o robô enquanto este corre numa passadeira.