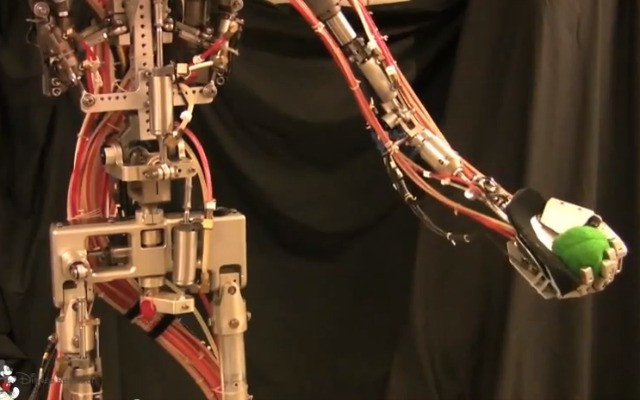
O robô humanóide ainda não desempenha esta tarefa de forma muito eficiente, mas já representa um progresso assinalável. Desenvolvido em Pittsburgh, nos EUA, o humanóide consegue identificar a trajetória de uma bola e agarrá-la. O robô usa um sensor Kinect para esta identificação e ajusta o seu braço para apanhar a bola, explica o Mashable.
O robô tem programadas algumas reações. Quando apanha a bola, olha para a sua mão e quando falha a recepção, abana a cabeça como se estivesse insatisfeito com o seu desempenho.
Ainda falta muito desenvolvimento para que este humanóide esteja pronto, mas já pode vê-lo em ação, no vídeo mais abaixo.