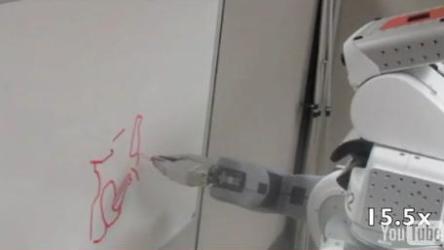
Segundo o DailyTech, o sistema de reconhecimento gestual é composto por uma câmara do periférico Kinect e algoritmos específicos baseados na antropometria que posiciona o braço mecânico em relação com a cabeça do cirurgião. A câmara, que capta imagens em 3D, está associada a um ecrã que mostra ao cirurgião imagens médicas do paciente durante a operação.
A inclusão do robô, que é controlado por gestos, na sala de operações tem como objetivo auxiliar o cirurgião durante uma intervenção médica e reduzir a duração das operações.
Os investigadores afirmaram, no entanto, que ainda é necessário desenvolver algumas melhorias no processo de reconhecimento gestual, nomeadamente na determinação dos gestos adequados para cada função a desempenhar pelo robô. Os investigadores pretendem ainda integrar o reconhecimento de voz.
Subscreva a newsletter da Exame Informática e receba todas as notícias sobre tecnologia por e-mail